Navigating the Night: Robust Night Scene Semantic Segmentation for Autonomous
Driving
Murari G, Prabha C. Nissimagoudar, Nalini C. Iyer, H. M. Gireesha
CVIP 2024 - 9th International Conference on Computer Vision and
Image Processing, IITDM Kancheepuram
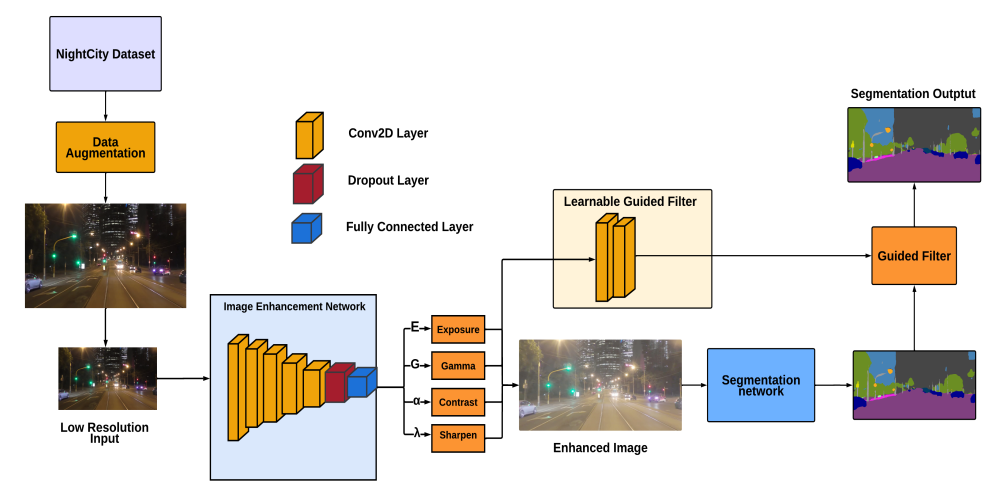
Addresses the critical challenge of semantic segmentation in low-light conditions by proposing a
novel
deep learning framework that enhances feature extraction and pixel-wise classification for nighttime
driving scenarios, achieving significant improvements in segmentation accuracy under challenging
illumination conditions.